 Fraunhofer-Institut für Hochfrequenzphysik und Radartechnik FHR
Fraunhofer-Institut für Hochfrequenzphysik und Radartechnik FHRAutonomes Fahren: Hindernisse erkennen und ihre Höhe analysieren
Sollen langfristig vermehrt fahrerlose Autos über die Straßen rollen, sind zuverlässige Sicherheitstechnologien gefragt. Wichtig ist vor allem die Erkennung von Hindernissen auf und an den Straßen. Lösen könnte diese Aufgabe ein Radarsystem: Es vermag selbst kleine Hindernisse in Entfernungen von 80 bis 150 Metern zu erkennen und deren Höhe zu bestimmen.
Ein Ball rollt auf die Straße, ein totes Tier liegt auf der Fahrbahn, eine Person überquert die Straße. Was ein menschlicher Fahrer mühelos erkennt, muss die Technik erst aufwändig lernen. So auch bei autonom fahrenden Autos: Im Zuge der Sicherheit müssen sie Hindernisse auf, neben und über der Straße zuverlässig identifizieren können. Bislang konnten entsprechende Systeme kleine Hindernisse jedoch erst aus etwa 10 bis 20 Meter Entfernung erkennen – was jedoch zu spät für einen Spurwechsel oder eine Vollbremsung sein kann.
Bis zu zehn Zentimeter kleine Objekte aus bis zu
150 Metern erkennen
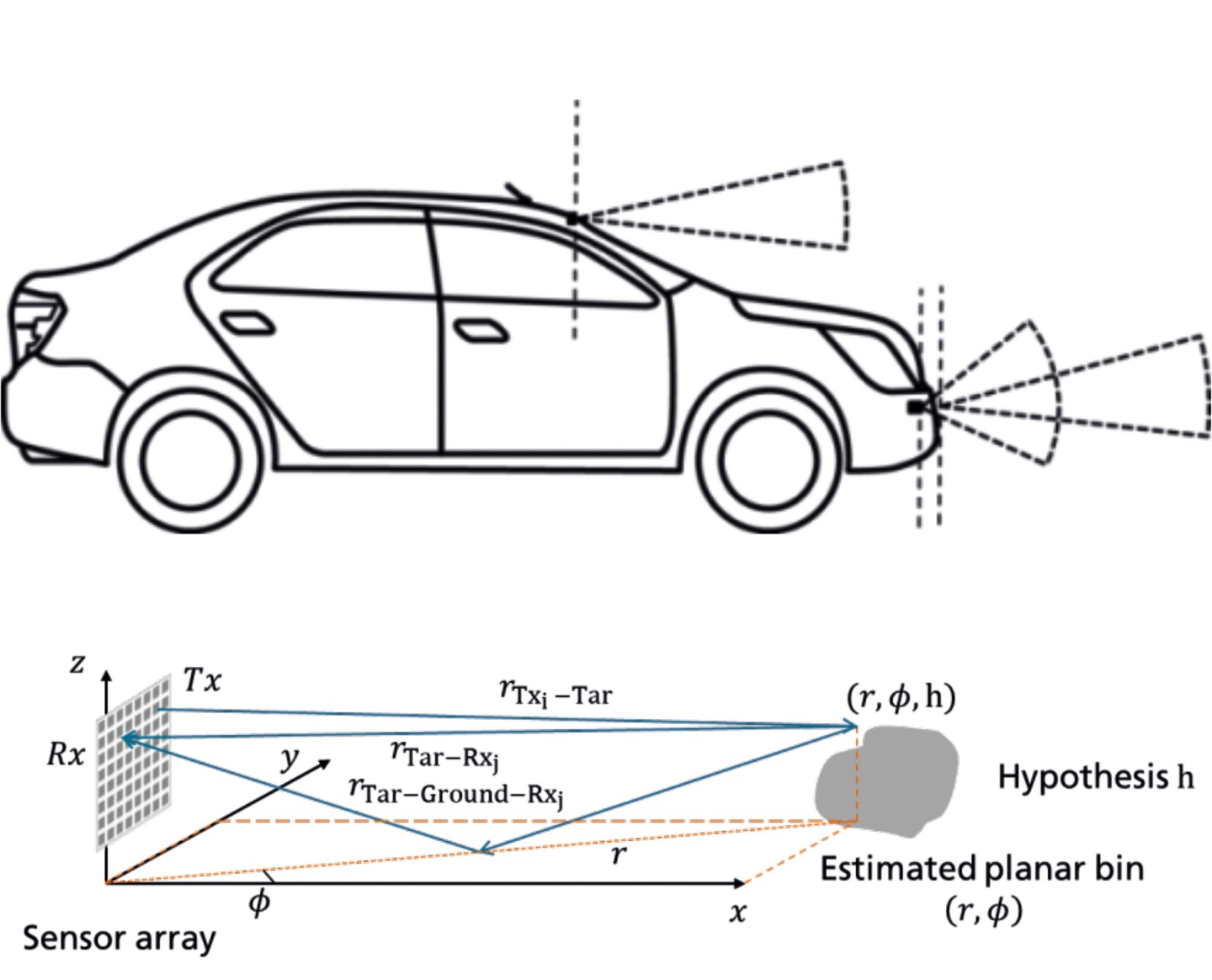
Eine radarbasierte Lösung aus dem Fraunhofer FHR könnte autonom fahrenden Autos künftig mehr Voraussicht verleihen: 10 bis 30 Zentimeter große Objekte erkennt sie bereits in 80 bis 150 Metern Entfernung. Auch die Höhe der Objekte kann sie auf bis zu fünf Zentimeter genau bestimmen. Entwickelt wurde das System im Auftrag von Audi. Das Prinzip: Im Auto werden kleine Radargeräte integriert, die Radarsignale aussenden. Diese werden von Hindernissen und der Straße zum Teil in den Radarsensor zurückreflektiert und dort ausgewertet. Drei geschickte Schachzüge erlauben, kleine Objekte auf große Distanz zu analysieren. Erstens setzt das System auf einen 2D-Antennenarray aus mehreren Antennen, die in unterschiedlicher Höhe angebracht sind. Zweitens analysiert es sowohl Phase als auch Amplitude entlang der gesamten untersuchten Fahrbahnlänge. Vereinfacht kann man sagen, dass die Amplitudenauswertung dabei hilft, die Größe des Objekts grob zu bestimmen, während die Phase für eine bessere Auflösung sorgt. Der dritte Clou liegt darin, Mehrweginformationen auszunutzen: Dabei wird nicht nur das Radarsignal analysiert, das vom Objekt selbst reflektiert wird, sondern auch solche, die z. B. erst von der Straße und dann vom Objekt reflektiert werden. Die Datenfusion erlaubt nicht nur, diese unterschiedlichen Signale miteinander zu kombinieren, sondern fusioniert auch Informationen von Mehrfach-Sensoren.
In verschiedenen Computersimulationen realistischer Szenarien konnte bereits gezeigt werden, dass das System grundsätzlich funktioniert und die Leistung herkömmlicher Methoden verbessert. Für 2020 sind erste Praxistests geplant, bei denen ein vorläufiges Radarsystem an einem Auto montiert und auf seine Tauglichkeit geprüft werden soll. Laufen diese Tests erfolgreich, könnte der nächste Schritt im Bau eines Prototyps bestehen.