 Fraunhofer-Institut für Hochfrequenzphysik und Radartechnik FHR
Fraunhofer-Institut für Hochfrequenzphysik und Radartechnik FHRGenaue Positionsbestimmung für selbstfahrende Autos
Befindet sich das Auto auf der richtigen Spur? Wie weit ist der Zebrastreifen noch entfernt? Was ein menschlicher Fahrer üblicherweise mit einem Blick abschätzt, erfordert bei autonom fahrenden Autos ausgeklügelte Sensoren. Am Fraunhofer FHR wurde nun untersucht, was Radarsensoren in diesem Zusammenhang leisten können. Das Ergebnis: Über sie lässt sich die Position des Autos auf einige Zentimeter genau bestimmen.
Sollen Autos künftig autonom durch Straßen und Gassen kurven, so ist dafür einiges an Basistechnologien nötig. Unter anderem muss das Fahrzeug seine Position auf wenige Zentimeter genau bestimmen können und dabei gegebenenfalls auch noch eine Karte der Umgebung erstellen. Man spricht dabei auch von SLAM, kurz für »Simultaneous Localization and Mapping«. Nötig ist das vor allem in Gebieten, in denen das GPS-Signal nicht genau genug oder die Umgebung unbekannt und keinerlei Kartenmaterial verfügbar ist. Generell lässt sich die Umgebung mit dreierlei Sensoren vermessen: Mit optischen Kameras, LiDAR und Radar. Optische Kameras funktionieren nur im Hellen und bei einigermaßen klarer Sicht. LiDAR-Systeme sind sperrig und teuer, auch sind ihre Ergebnisse unter schlechten Wetterbedingungen wenig verlässlich. Eine Alternative bieten Radarsysteme: Sie liefern auch bei Nebel, starkem Regen und Dunkelheit zuverlässige Ergebnisse.
Untersuchung anhand realer Testdaten
Lässt sich eine solche Selbst-Positionsbestimmung via Radarsensoren im Auto realisieren? Dies wurde am Fraunhofer FHR untersucht. Als Testdaten dienten dabei Daten von nuScenes, ein breit angelegter öffentlicher Datensatz für das autonome Fahren. Diese umfassen Radardaten ebenso wie LiDAR-Daten und Daten von optischen Kameras. Das Framework stammt aus dem Bereich der Robotik – schließlich müssen sich Roboter auch unfallfrei in ihrer Umgebung bewegen können und ihr Umfeld dafür genauestens erfassen.
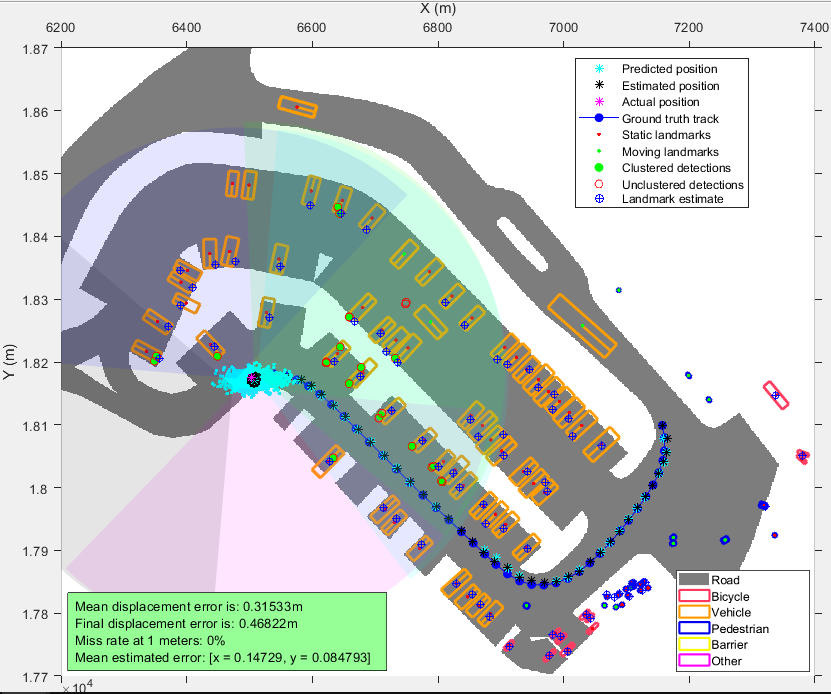
Da die Radardaten zu umfassend sind, um jeden einzelnen Punkt auszuwerten, werden Daten, die zu einem Objekt gehören, zusammengefasst. Dabei helfen Begrenzungsrahmen, die anhand der Sensordaten von Kamera und LiDAR erstellt wurden. Wird beispielsweise ein Begrenzungsrahmen für ein Auto erstellt, werden alle in diesem Rahmen liegenden Radardaten geclustert. Die Arbeit bezüglich SLAM zeigt: Zwar ermöglichen Selbstlokalisierungstechniken, die nur Radardaten und bekannte Orientierungspunkte verwenden, höhere Positionierungsgenauigkeiten – doch ermöglichen SLAM-Techniken es auch dann, wenn keine anderen Sensordaten verfügbar sind, gleichzeitig eine Karte mit Radardaten zu generieren. Die Position des Autos lässt sich auf wenige Zentimeter genau bestimmen.