 Fraunhofer Institute for High Frequency Physics and Radar Techniques FHR
Fraunhofer Institute for High Frequency Physics and Radar Techniques FHRAutonomous driving: Detecting small obstacles and estimating their height
If an increasing number of driverless cars is to hit the road in the long run, reliable safety technology will be needed. Recognizing obstacles on the road and along the roadside will be particularly important. This task could be solved by a radar system: It is capable of recognizing even small obstacles and determining their heights at distances from 80 to 150 meters.
A ball is rolling into the street, a dead animal is on the road, a person is crossing the street – technology has to put in a lot of effort to learn things that a human driver easily recognizes. This also applies to autonomous cars: To ensure safety, they will have to be able to reliably identify obstacles on, next to, or above the road. To date, however, such systems only detect small obstacles from distances of about 10 to 20 meters – which is too late to change lanes or fully brake.
Recognizing Objects as Small as 10 cm from up to 150 Meters Away
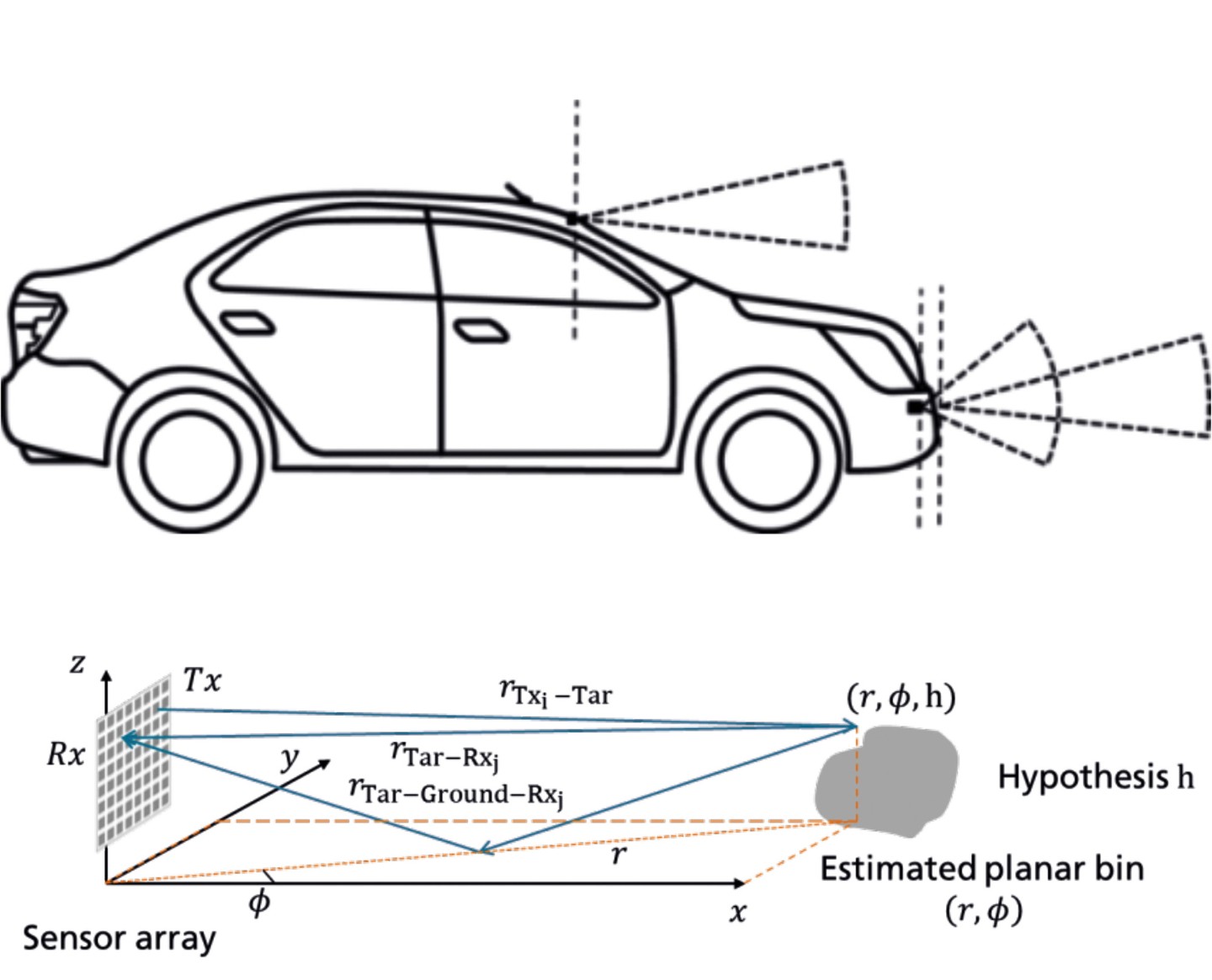
A radar-based solution developed by Fraunhofer FHR could provide autonomous cars with more foresight in the future: It already recognizes objects with sizes of 10 to 30 centimeters from distances of 80 to 150 meters. It can even determine their height with an accuracy of up to five centimeters. The system was developed on behalf of Audi. The principle: Small radar systems are integrated into the car from where they send out radar signals. Obstacles and the road reflect some of these signals back to the radar sensor that then analyzes them. Three clever moves make it possible to analyze small objects at large distances. First, the system uses a 2D antenna array consisting of multiple antennas positioned at different heights. Second, it analyzes both the phase as well as the amplitude along the entire examined length of the road. In simplified terms, one can say that the analysis of the amplitude helps to roughly determine the size of the object, while the phase provides for a better resolution. The third move consists of utilizing multipath information: In doing so, not only the radar signal reflected by the object itself is analyzed, but also those that are reflected first by the street and then by the object, for example. The data fusion not only allows for these different signals to be combined with each other, but also fuses information from multiple radar sensors.
Different computer simulations of realistic scenarios already showed that the system generally works and is improving the performance of conventional methods. First field tests are planned for 2020. These will involve installing a preliminary radar system in a car and checking its suitability. If the tests go well, the next step could consist of building a prototype.