 Fraunhofer Institute for High Frequency Physics and Radar Techniques FHR
Fraunhofer Institute for High Frequency Physics and Radar Techniques FHR»Around the corner« Radar: Indirect Localization of Objects
Houses are not transparent for radar signals since the signals are reflected on the walls. However, multipath signals – which return to the detector not directly but through multiple reflections – can be used to virtually look around the corner. This makes it possible to obtain additional information which could otherwise not be captured by radar.
House walls are like mirrors for radar systems: They reflect and return the emitted signal, obstructing the view behind the buildings. Thus, in heavily urbanized areas, i.e. in cities, the signal is quickly shaded by house walls. You cannot see much. The same is true for certain object shapes: They do not return the echo back into the direction of the original signal, but into another one – thus being invisible to radar. How can a concealed object still be detected by radar? And can such a technology also be useful to increase the information content of the measurements of the objects that are directly visible?
Multipath Signals to Obtain More Information
Fraunhofer FHR is breaking new ground in this area: The use of multipath signals – i.e. signals that are not reflected back directly by the object, but by the object and other surfaces. Up to now, the idea has been to eliminate these, because they can cause interferences with the signal. But we can actually put them to use. The approach: If we use multiple transmitting antennas and multiple receiving antennas – i.e. antenna arrays – and if the signals are continuously being reflected in a zigzag course in an urban canyon, for example, we would able to look »around the corner«. The challenge in the process: Based on the signals received, we have to be able to identify whether these signals have been reflected directly or whether they reached the receiving antenna via another path.
Fraunhofer FHR uses a multiple-input multiple-output radar, MIMO in short. This radar consists of individual antennas sending different transmission signals, which allows the echoes to be associated with the respective transmitting antennas. In doing so, the direction from which the system receives the signals is different from the one it sends them in – this makes it possible to eliminate the direct signals. Each antenna sends out a signal that illuminates a very large area, while the receiving antennas also receive an echo from different directions. The direction in which the respective antenna is to point is only set in the computer afterwards. In short: The radar lobes can be set digitally afterwards. In this way, a type of matrix can be created that plots the different directions of transmitting and receiving antennas against each other. The result is high-dimensional: Frequently there are up to five dimensions. Two-dimensional images can be cut out of these dimensions as desired. Examples of these dimensions include the transmitting direction, the distance of an object or the signal's transit time. Direct signals with identical transmission and return paths through the urban canyon are not yet recognized. Polarimetric signals could be interesting here – in the long run, these could be used to identify whether the signal has gone through an even or an uneven number of reflections. Fraunhofer FHR developed this entire technology – from the hardware up to the signal processing. This involved answering questions both about the antenna arrangement and the array design as well as about data processing. For instance, what possibilities do we have to separate the signals?
Proof of Concept Completed Successfully
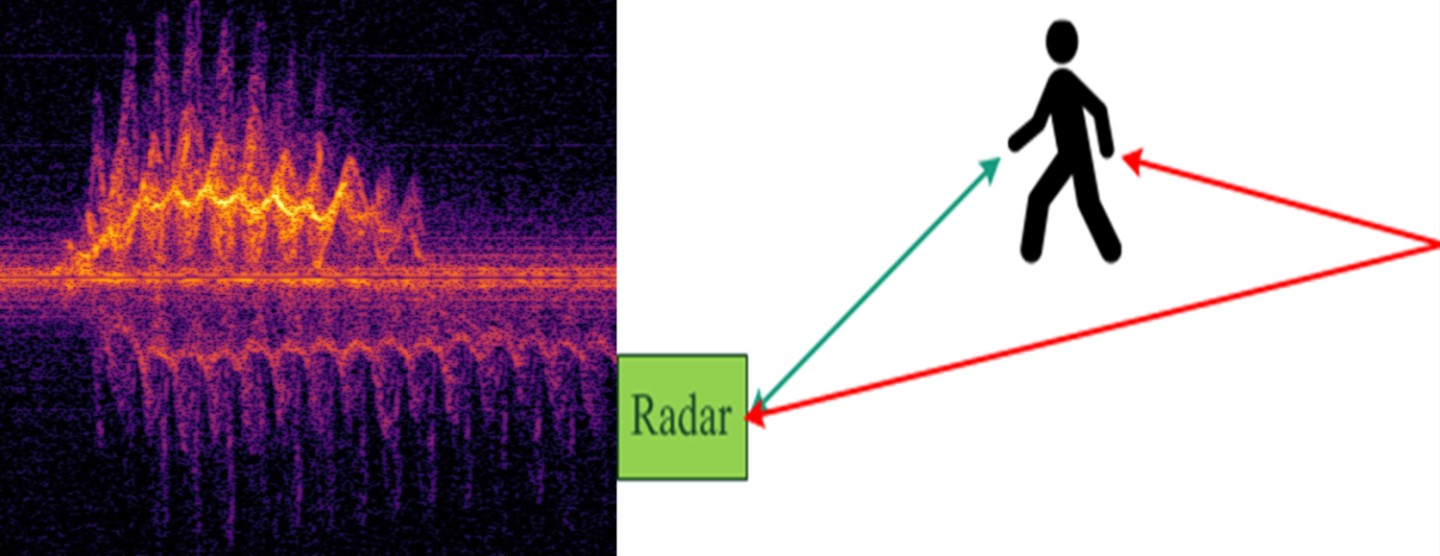
First measurements have already been completed: Two whiteboards were used as reflective surfaces. The signal was reflected from the first whiteboard to the second and from there back to the receiving antenna. In an additional experiment, one of the whiteboards was replaced by a person. The signals reflected directly by the person and those reflected by the person via the whiteboard back to the receiving antenna were compared. The signals were separated successfully. A next step will involve experiments with concealed objects. The system is of particular interest for the classification of objects: The more information is available for this, the better the classification that can be achieved.